Cette année, la coupe s’est déroulée à la Roche-Sur-Yon du mercredi 29 mai au samedi 1er juin.
Mercredi
Nous nous sommes rendus sur place dès le mercredi après midi pour les phases d’homologation : il s’agit de déterminer si un robot respecte le règlement du concours, et sont vérifiés les points suivants :
- Homologation statique : dimensions du robot conformes (pour le robot principal, 120 cm de périmètre max au repos, 150 cm déployé), poids respecté, etc.
- Homologation dynamique : le robot marque au moins un point, et dispose d’un système d’évitement efficace.
Nous avons passé cette étape du premier coup, ce qui nous a mis en confiance pour la suite de la coupe ! Le soir, nous avons travaillé jusqu’à 2h du matin pour perfectionner notre stratégie (ajout d’un recalage avant la libération du goldium) et notre évitement.
Jeudi

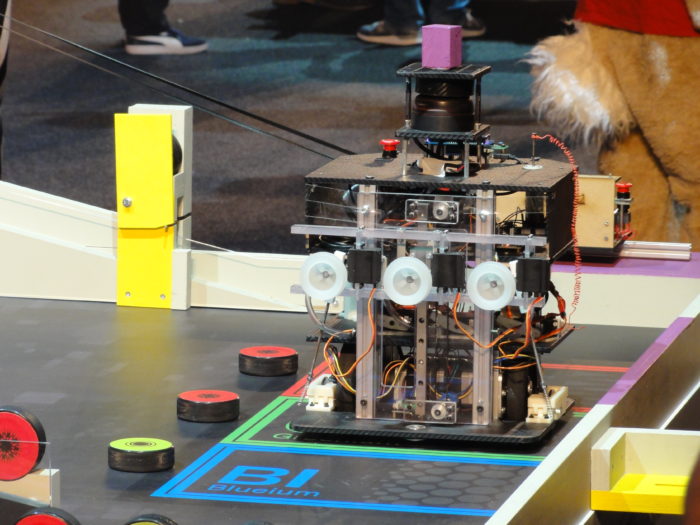
MiAM Robotique prépare son premier match
Les premiers matchs ont eu lieu dès le jeudi matin. Comme le tournoi se déroule en une phase de qualifications en 5 matchs et des phases finales, chaque équipe est appelée à jouer à 5 séries (une par demi journée le jeudi, vendredi et samedi matin) et éventuellement davantage le samedi pour les phases finales. Les matchs du jeudi se sont bien passés, nous nous sommes toutefois rendus compte sur le second match que notre évitement était trop conservateur, ce sur quoi nous avons longuement travaillé le jeudi soir jusqu’à 1h du matin…
Vendredi
Gertrude à son 4e match
Le vendredi s’est également bien passé malgré un 3e match le matin difficile dû à un choc avec le robot de l’équipe RCVA dont l’évitement par ultrasons n’a pas bien fonctionné. Vu les matchs que nous voyions, nous avons concentré nos efforts sur une nouvelle stratégie permettant de ne pas nous retrouver coincés dans la zone en bas du tableau périodique et près du goldenium adverse : en effet, de nombreuses équipes choisissent d’aller récupérer cet élément au début du match, ce qui nous coincerait possiblement dès les 20 premières secondes du match. Nous avons travaillé jusqu’à minuit pour notamment fiabiliser le système d’évitement, qui avait tendance à stopper le robot alors même que nos mouvements étaient possibles malgré la présence du robot adverse.
Samedi
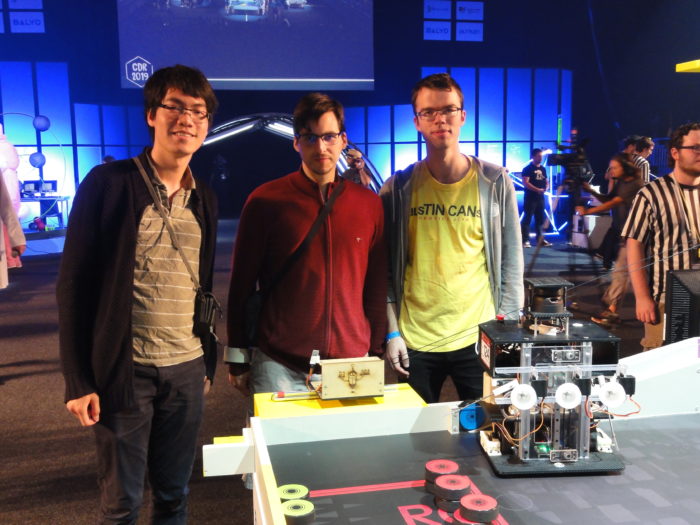
Quentin, Ianis et Matthieu après le 5e match
Le samedi, notre match du matin s’est bien déroulé, ce qui nous a ouvert la voie vers les phases finales avec un classement de 10e sur 131 équipes aux phases de qualification ! Nous sommes alors la seule équipe qualifiée à ne présenter qu’un seul robot. Étant donné l’ordre de grandeur du nombre de points à atteindre pour rivaliser avec les meilleures équipes (nous ne disposons que d’un robot principal qui fait au maximum 200 points alors que de nombreuses équipes atteignent facilement 230 points avec 2 robots), nous avons travaillé le midi sur une nouvelle stratégie pour déposer le goldenium dans la balance. De plus, ayant cassé un servomoteur pendant le 5e match, nous avons réalisé une opération de maintenance invasive en urgence.
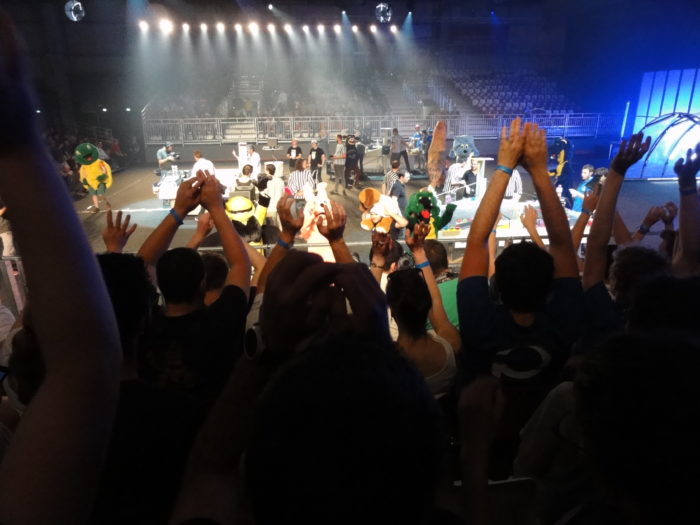
Beaucoup d’ambiance pour les phases finales ! On le voit mal mais MiAM se prépare à jouer sur la table de gauche.
Lors des 8e de finale, nous n’avons pas eu l’occasion de réaliser cette action, et nous nous inclinons devant l’équipe adverse avec un score qui approche du score maximum réalisable par notre robot principal par sa conception. Très satisfaits de notre performance, nous assistons avec plaisir au reste des matchs des phases finales, qui sont d’une grande qualité et d’un niveau impressionnant. Nous repartons samedi soir avec des étoiles dans les yeux :).