MiAM Robotique
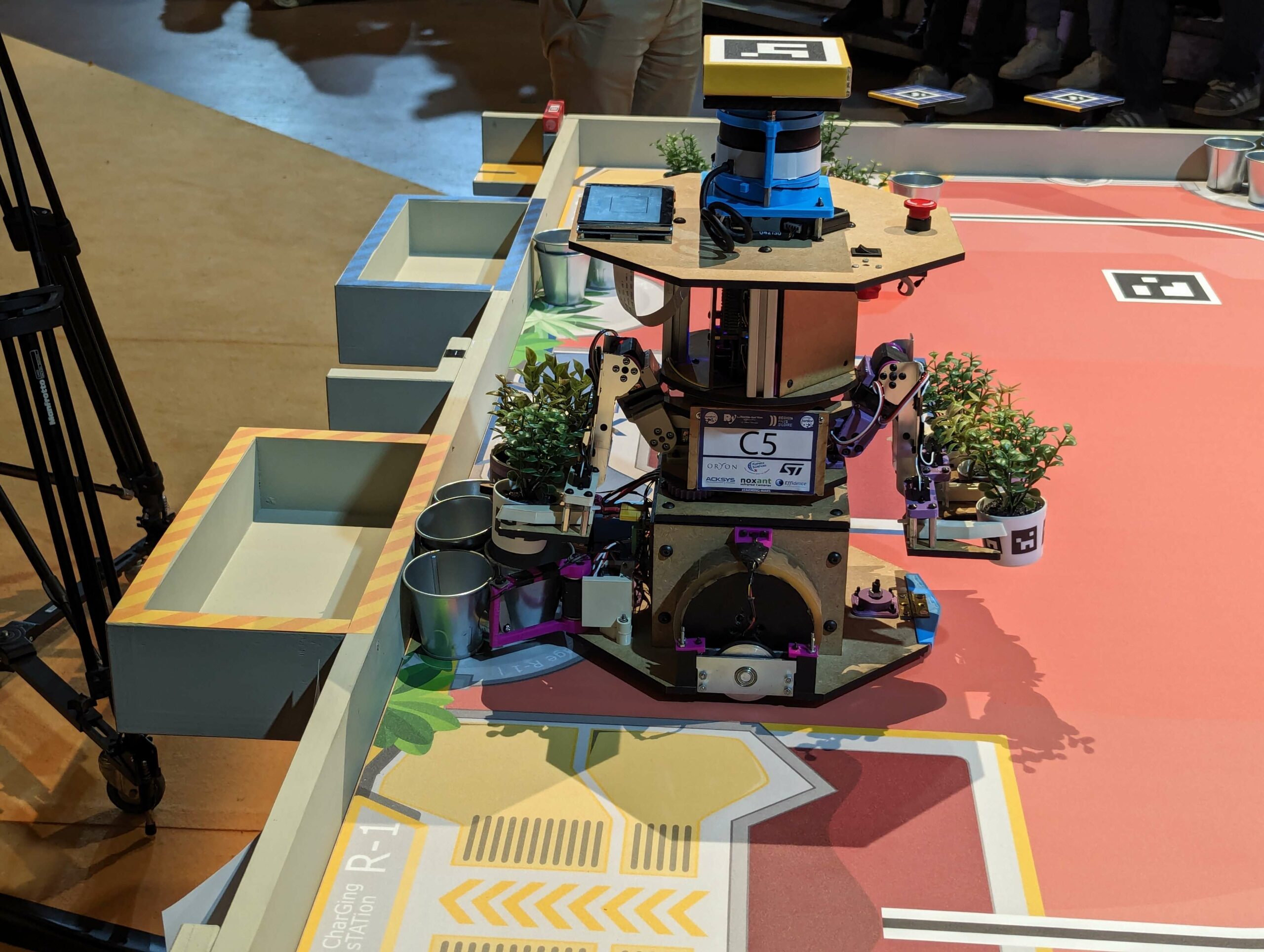
Archibald, notre robot 2024 est conçu autour d’un système de tourelle qui tourne autour de la base roulante. La tourelle dispose de 2 bras avec un système de pinces qui permet d’attraper 6 plantes au total. Sur la base, des bras munis d’électroaimants peuvent se déployer pour récupérer les pots en métal.
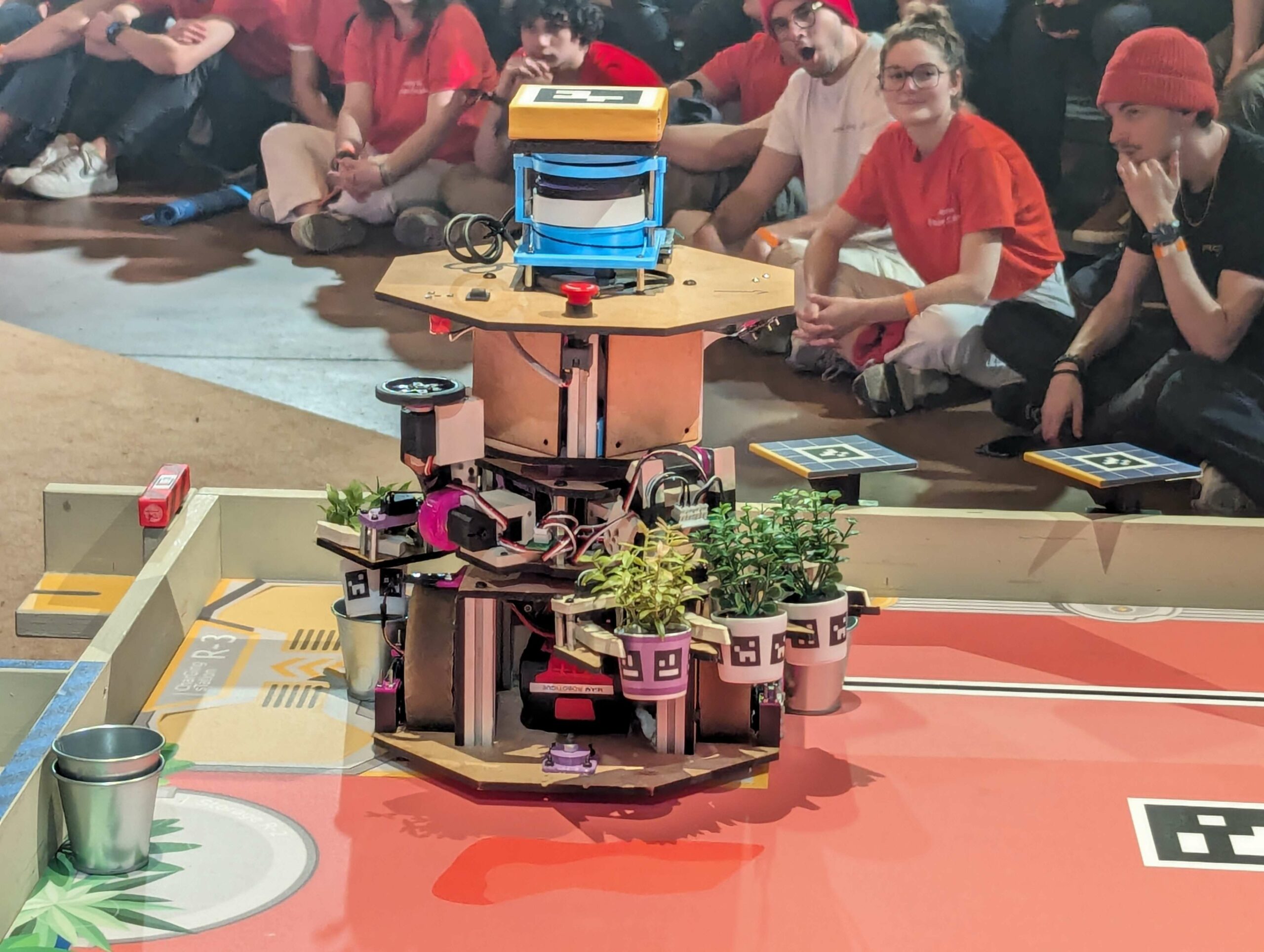
Archibald, le robot de MiAM Robotique
Le robot en train de récupérer des pots
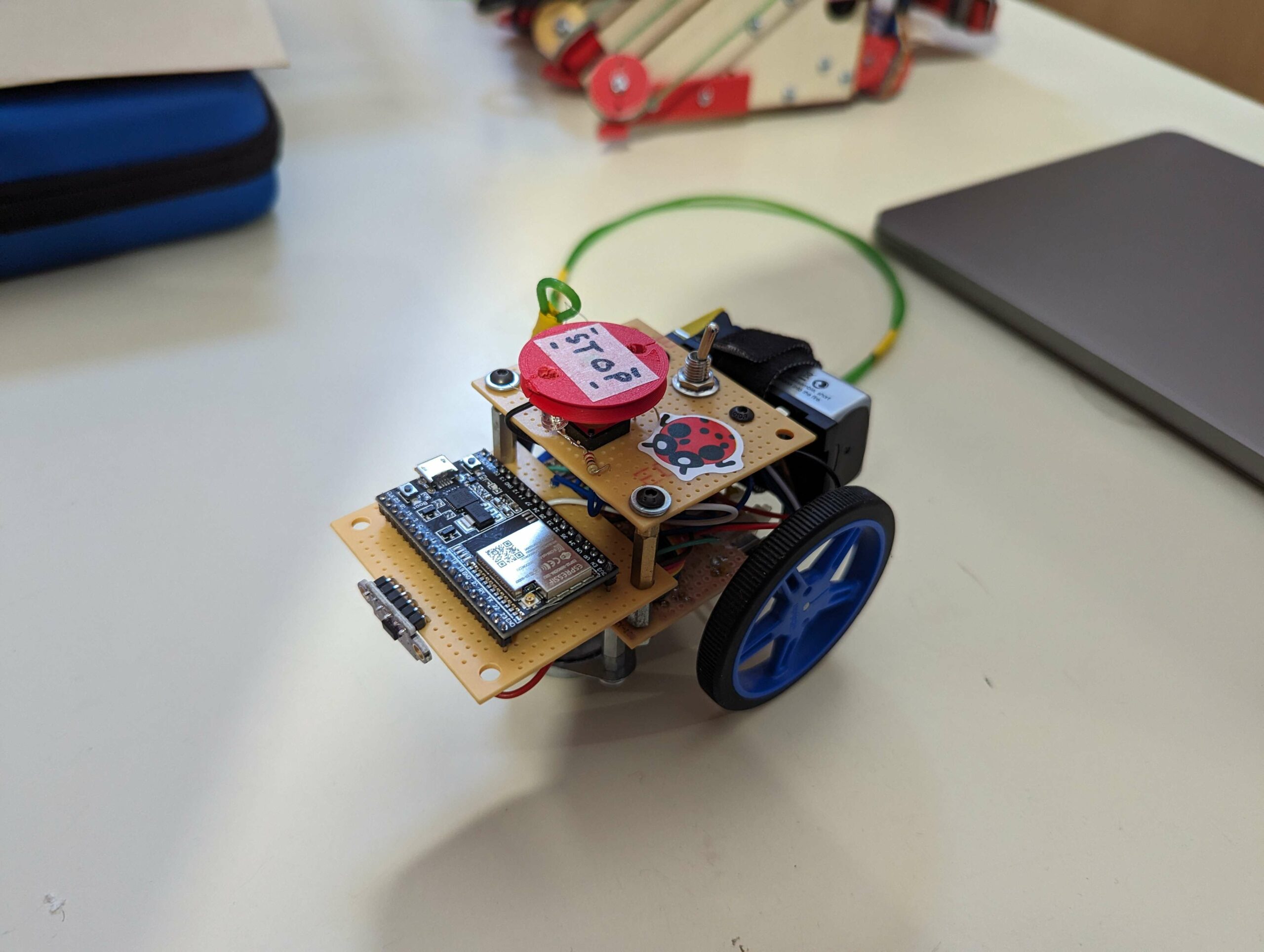
Nous avons conçu 5 PAMI autour de cartes de développement ESP32 et d’une base roulante DC ou stepper. Ces PAMI disposent de leurs propres PCB maison, ce qui permet la miniaturisation. Ils communiquent en WiFi (2,4 GHz) avec le système de calcul déporté en transmettant leur couleur et leur niveau de batterie, et ce dernier leur renvoie des informations à propos de l’état du match. Un bras peut se déployer pour toucher des plantes en douceur dans les zones de dépose.

Les PAMI de MiAM Robotique au lancement !

Les PAMI à l’arrivée
Le système de calcul déporté affiche notre beau logo, et dispose d’un routeur WiFi et d’une interface basée sur ESP32 permettant de configurer et déclencher les PAMI.
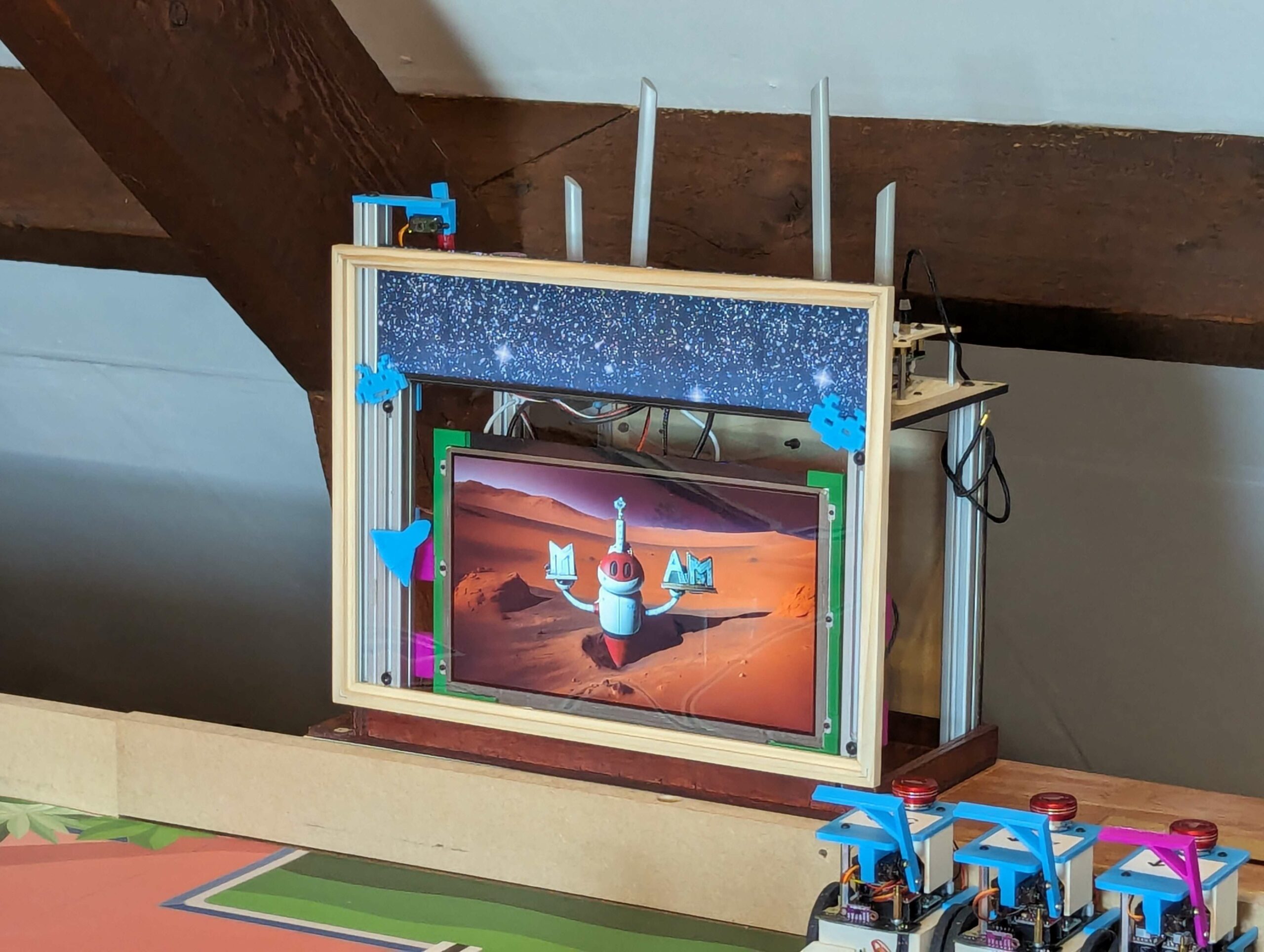
Le système de calcul déporté de MiAM Robotique
StonksIndustries
Le robot de StonksIndustries dispose d’un système de convoyeur permettant de récupérer les plantes par l’avant, pour les déposer dans des pots à l’arrière, grâce à un système d’électroaimants.

Le robot de StonksIndustries
SAMI, le PAMI de StonksIndustries, est né pendant la Coupe ; il est basé sur une ESP32 et deux moteurs DC, et a été fabriqué et codé en 1 journée. Son fonctionnement est impeccable ! (mais il ne sait aller qu’en ligne droite)
SAMI, le PAMI de StonksIndustries, né pendant la Coupe le 9/05/2024